| 书目名称 | Cutaneous Haptic Feedback in Robotic Teleoperation |
| 编辑 | Claudio Pacchierotti |
| 视频video | http://file.papertrans.cn/242/241663/241663.mp4 |
| 概述 | Provides a comprehensive experimental evaluation of cutaneous haptic feedback in several robotic teleoperation scenarios.Takes into account many real systems, e.g., the KUKA KR3 robot, the DLR-HIT han |
| 丛书名称 | Springer Series on Touch and Haptic Systems |
| 图书封面 |  |
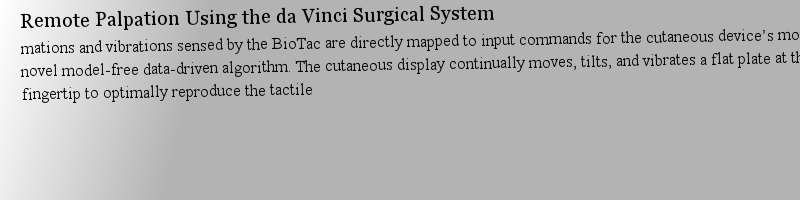
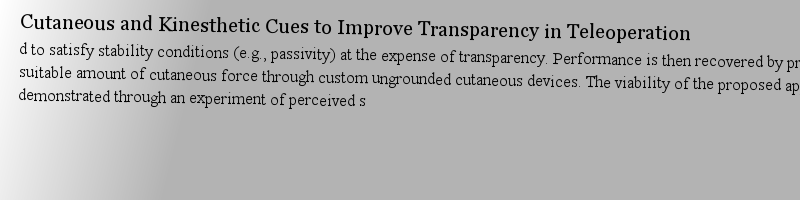
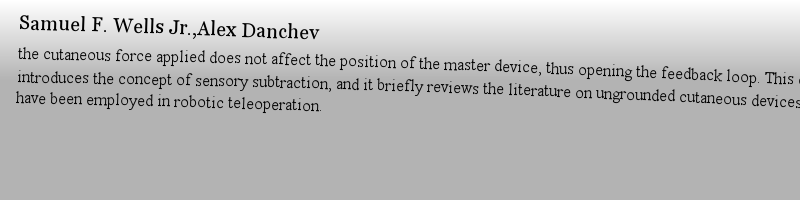
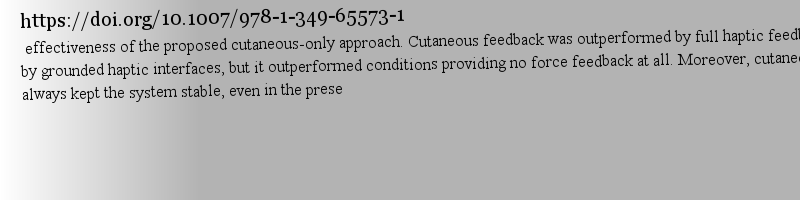
| 描述 | .This work addresses the challenge of providing effective cutaneous haptic feedback in robotic teleoperation, with the objective of achieving the highest degree of transparency whilst guaranteeing the stability of the considered systems. On the one hand, it evaluates teleoperation systems that provide only cutaneous cues to the operator, thus guaranteeing the highest degree of safety. This cutaneous-only approach shows intermediate performance between no force feedback and full haptic feedback provided by a grounded haptic interface, and it is best suitable for those scenarios where the safety of the system is paramount, e.g., robotic surgery. On the other hand, in order to achieve a higher level of performance, this work also investigates novel robotic teleoperation systems with force reflection able to provide mixed cutaneous and kinesthetic cues to the operator. Cutaneous cues can compensate for the temporary reduction of kinesthetic feedback necessary to satisfy certain stability conditions...This state-of-the-art volume is oriented toward researchers, educators, and students who are interested in force feedback techniques for robotic teleoperation, cutaneous device design, cut |
| 出版日期 | Book 2015 |
| 关键词 | Cutaneous Feedback; Haptic Feedback; Haptics; Robot-assisted Surgery; Robotic Teleoperation |
| 版次 | 1 |
| doi | https://doi.org/10.1007/978-3-319-25457-9 |
| isbn_softcover | 978-3-319-37413-0 |
| isbn_ebook | 978-3-319-25457-9Series ISSN 2192-2977 Series E-ISSN 2192-2985 |
| issn_series | 2192-2977 |
| copyright | Springer International Publishing Switzerland 2015 |
 |Archiver|手机版|小黑屋|
派博传思国际
( 京公网安备110108008328)
GMT+8, 2026-2-8 14:28
|Archiver|手机版|小黑屋|
派博传思国际
( 京公网安备110108008328)
GMT+8, 2026-2-8 14:28





 发表于 2025-3-21 18:42:44
发表于 2025-3-21 18:42:44